
Manuscript accepted on :February 06, 2018
Published online on: --
Plagiarism Check: Yes
Nisheena V. Iqbal, Kamalraj Subramaniam and Shaniba Asmi P.
Department of Electronics and Communication Engineering Karpagam university, Coimbatore India.
Corresponding Author E-mail: nisheenasaigil@gmail.com
DOI : https://dx.doi.org/10.13005/bpj/1382
Abstract
This paper evaluates the use of wavelet packet entropy to classify upper limb motions using myoelectric signals(MES). Being non-stationary, suitable analysis is essential for myoelectric signals recorded at varying force levels. In this paper, different entropy measures calculated from wavelet packet transform coefficients, termed as wavelet packet entropies (WPE) are compared with power spectral entropy and permutation entropy in terms of their performance in myoelectric prosthetic control. The system was trained using MES corresponding to six upper limb movements at three different force levels. WPE feature was found to exhibit better classification accuracy compared to other entropy features. Among the WPE features log-energy WPE outperformed the other four WPE features; while a combination of log-energy and sure WPE yielded the best classification accuracy when used with a simple linear discriminant analysis(LDA) classifier for medium force level testing.
Keywords
Analysis linear Discriminant;Myoelectric; WPE;
Download this article as:| Copy the following to cite this article: Iqbal N. V, Subramaniam K, Shaniba A. P. Wavelet Packet Entropy Based Control of Myoelectric Prosthesis. Biomed Pharmacol J 2018;11(1). |
| Copy the following to cite this URL: Iqbal N. V, Subramaniam K, Shaniba A. P. Wavelet Packet Entropy Based Control of Myoelectric Prosthesis. Biomed Pharmacol J 2018;11(1). Available from: http://biomedpharmajournal.org/?p=19036 |
Introduction
Upper limb prosthetic control using surface EMG (SEMG) signal or myoelectric signal(MES) has become popular over years due to its convenient and non invasive access. MES which contains information about the neuromuscular activities serves as the control input for the prosthesis.1 Most of the commercially available myoelectric prostheses use amplitude level based control in which a threshold value is set for SEMG amplitude , based on which movements are classified.But for robust control of multiple tasks, a mere comparison af amplitudes to predict muscle activity is not a feasible solution.6,7 This paved the way for pattern recognition(PR) based myoelectric prosthetic control which assumes certain similarities in the patterns of MES whem same type of muscle activities are repeated.2 Data acquisition, feature extraction and classification are the three primary steps in any PR systems.
Numerous PR based algorithms based on time domain, frequency domain and time-frequency domain have been proposed in literature.5 In spite of the tremendous progress in the research of PR based myoelectric prosthetic algorithms which yielded classification accuracies greater than 90%, usability of these systems is challenged by factors which give rise to non-stationary changes to EMG signals between training and control phases.3,8 These factors include shift in electrode location, variation in muscle contraction levels, variation in arm and trunk positions, changes in pattern over time etc.
It was shown by that variation in force of contraction between training phase and control phase, hinders the performance of PR based systems. Training the classifier with all possible contraction level is not a practical approach when the number of classes is large.4 Features of SEMG signal which is invariant to contraction levels could yield better control. In He et al., a frequency based feature set was proposed and applied on to MES collected from healthy subjects at different contraction levels. This new feature set outperformed the classical time domain feature set. However, the special arrangement of electrode placement described in the paper is not practically feasible on a transradial amputee. Al Timemy et al. extracted a set of power spectrum moments called time dependent power spectrum descriptors, directly from the time domain signal, to classify movements with different contraction levels. Training strategy which included muscle contractions with all the three force levels in the training set proved most efficient. Poor performance was obtained when the classifier is trained with unseen force levels .
In this paper, Wavelet packet entropy which gives a measure of randomness of nonlinear time series data is used as features. Findings from the paper reveal that wavelet packet entropy performed better when compared with other entropy features. Also, among different wavelet packet entropies, log-energy entropy gave excellent performance.
Experimental Protocol
Myoelectric data used to test the performance of entropy features were collected from the open data base (https://www.rami-khushaba.com/electromyogram-emg-repository.html). EMG signals corresponding to six movements, thumb flexion, index flexion, fine pinch, tripod grip, hook grip and spherical grip collected from nine transradial amputees for three different force levels comprised the data set.13 Eight pairs of Ag/AgCl electrodes connected to a differential amplifier were placed around the stump of the amputees. EMG data at a sampling rate of 2000Hz was acquired using a custom-made multi channel EMG acquisition system. A virtual instrument implemented in LABVIEW was used for signal acquisition and display. After electrode placement, each of the amputees examined their EMG signal on the screen provided by LABVIEW software in real time. Thus they get familiarized with the amplitude of the signal when different force levels are applied for different movements.
Producing different force levels was a challenging task for the amputees. For this, they imagined the movements with their intact hand, while collecting the signals from the amputed one. Three force levels: low, medium and high, were produced by the amputees for each of the six patterns. Five to eight trials of 8-12 second duration are taken for each force level. Thus, total number of trials performed by each amputee is the product of number of movements, number of force levels and number of trials.
Materials and Methods
Feature Extraction
Wavelet Packet Entropy
Wavelet packet transform(WPT) which is a more comprehensive form of standard wavelet transform is an appropriate tool for time frequency analysis of MES which are inherently non-linear. In WPT analysis, high pass and low pass filters are employed to split the signal into approximate and detail coefficients. A complete subband tree decomposition is obtained by repeated filtering an decimation by two. But WPT yields enormous amount of data which makes it unsuitable for a classifier. Entropy measured from specific subbands could serve as a better representation for MES. This type of entropy measured from wavelet packets termed as wavelet packet entropy gives a measure of randomness of nonlinear time series data.10,11
Following are the steps to calculate wavelet entropy:
Detail and approximate coefficients are derived from MES by multilevel wavelet packet decomposition principle using Symlet wavelet at level 4.
Total power contained in MES can be expressed as the sum of individual power of all the wavelet coefficients. i.e. Pt = Σ Pwi; where Pt and Pwi are the total power and individual component power respectively.
If Pi = Pwi/Pt, then wavelet entropy is defined as
Wen = – Σ Pi logPi
In this paper Shannon, Sure, Log-energy, Norm and Threshold entropies derived from wavelet packets are employed as features for MES classification. In the following expressions, s is the signal and (si)i the coefficients of s in an orthonormal basis.
The entropy E must be an additive cost function such that E(0) = 0 and E(s) = Σ E(si)
The (nonnormalized) Shannon entropy.
![]()
so,
with the convention 0log(0) = 0.
The concentration in lp norm entropy with 1 ≤ p.
E2(si ) = |si|p so
The “log energy” entropy.
so,
with the convention log(0) = 0.
The threshold entropy.
E4(si) = 1 if |si| > p and 0 elsewhere so E4(s) = #{i such that |si | > p} is the number of time instants when the signal is greater than a threshold p.
The “SURE” entropy.
E5(s) = n – #{i such that
These wavelet entropy features are compared with Spectral energy entropy and Permutation entropy, which are explained below.
Spectral Energy Entropy(Sen)
Spectral energy entropy, a normalized form of Shannon entropy makes use of the amplitude components of the power spectrum of the given signal as probabilities for entropy calculations.11,12 Following are the steps to calculate the spectral energy entropy of a signal x(t),
take DFT of the signal X(w) and calculate the Power Spectral Density(PSD), P(w)
P(w) = 1/N IX(w)I2.
Obtain PSD distribution function by normalizing P(w)
Spectral energy entropy is now given by, Pse = – Σ Pi logPi
Permutation Entropy (Pen)
Permutation entropy is a measure of chaotic and non-stationary time series signal which elevates with asymmetry of the time series at high frequencies and drops at low frequencies. PE is given by, PE = – Σ Pi logPi, where Pi represents the relative frequency of the possible sequence patterns, n implies permutation order of n≥2. The advantage of this type of entropy is that no model assumptions are required and is suitable for the analysis of non linear processes. Also it could analyze huge data sets with less pre-processing time and fine tuning of parameters.
Feature extraction and classification are done in R2013a MATLAB Version. Once the feature sets are extracted, 60% of the extracted features are used to train the classifier and the remaining 40% are used for testing. Classification is done using linear discriminant analysis (LDA), Probabilistic Neural Network(PNN) and Support Vector Machine(SVM) classifiers.
Results and Discussion
On classifying movements subjected to different force levels, classification accuracy of features based on wavelet packet entropy outweigh that of permutation entropy and spectral energy entropy. The main advantages of wavelet packet entropy are that fine changes in a non-stationary signal can be easily detected, computationally simple, noise contributions can be easily eliminated and performance does not depend on any parameters. This accounts for the superior performance of wavelet packet entropy features.
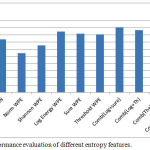 |
Figure 1: Performance evaluation of different entropy features.
|
(SEN-spec tral energy entropy
PEN-permutation entropy
NWPE-norm WPE
SWPE-shannon’s WPE
LEWPE-log-energy WPE
SWPE-sure WPE
TWPE-threshold WPE
CLS-WPE-combination of LEWPE and SWPE
CLT-WPE-combination of LEWPE and TWPE
CTS-WPE–combination of TWPE and SWPE
CLTS-WPE–combination of LEWPE TWPE and SWPE
CA-classification accuracy)
Among WPEs, maximum classification accuracy of 85% was given by Log-energy entropy, when used with LDA classifier. From fig1. It can be seen that combination of log-energy WPE and Sure WPE with 92% accuracy outperformed all the other combinations. The least performer among wavelet packet entropy features was norm entropy with an accuracy of only about 55%.
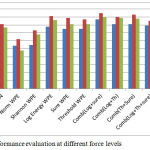 |
Figure 2: Performance evaluation at different force levels
|
Another notable result from this study is that performance was maximum when the classifier is tested with medium force level movements rather than high and low force levels. Classification accuracy of 86%, 95% and 89% were obtained respectively for high, medium and low force level testing when all force levels were included in the training set.
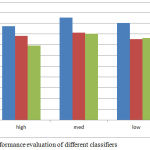 |
Figure 3: Performance evaluation of different classifiers
|
LDA classifier gave a superior performance compared to Support Vector Machine classifier and Probabilistic Neural Network classifier.9 LDA classifier is generally less complex and easy to implement.
Conclusion
The proposed study suggested wavelet packet entropy feature which has time frequency domain characteristics to analyze myoelectric signal collected at different force levels. Performance of wavelet packet entropy feature was found to excel that of other entropy features. For all the training/testing strategies used, log-energy entropy of wavelet coefficients outperformed other wavelet packet entropy features. For all the features, better classification was obtained when the classifier is trained with all the force levels and tested with medium force level. The overall performance of the proposed method when evaluated based on classification accuracy proved that the combinational feature set consisting of log-energy entropy and Sure entropy extracted from wavelet coefficients, when classified using LDA at medium force level testing could be a potential candidate in classifying upper limb movements subjected to different force levels.
References
- Dorcas D and Scott R.N. “Improved myoelectric control systems”, Med. BioI. Eng. 1970;4:367-372.
CrossRef - Hudgins B, Parker P and Scott R.N. “A new strategy for multifunction myoelectric control.” IEEE Trans. Biomed. Eng. 1993;Jan 40(1):82-94.
CrossRef - Jiang N, et al. “Myoelectric control of artificial limbs: is there the need for a change of focus? IEEE Signal Process. Mag. 2008;152:1–4. doi: 10.1109/MSP. 2012.2203480. 1221-1224, 2012.
- Al-Timemy A.H,Khushaba R.N, Bugmann G. and Escudero J. “Improving the Performance Against Force Variation of EMG Controlled Multifunctional Upper-Limb Prostheses for Transradial Amputees,”IEEE Trans. Neural Syst. Rehabil. Eng. June 2016;24(6): 650-661.
CrossRef - Iqbal N.V, Subramaniam K & Asmi S.P. A Review on Upper-Limb Myoelectric Prosthetic Control, IETE. Journal of Research. 2017;DOI: 10.1080/03772063.2017.1381047
CrossRef - Scheme E MSc, PEng, and PEng Englehart K PhD. “Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use.” Journal of rehabilitation research and development. 2011;48(6):643.
CrossRef - Jiang N, Englehart K and Parker P. “Estimating forces at multiple degrees of freedom from surface EMG using non-negative matrix factorization for myoelectric control,” 2008 First Intl. Symposium on Applied Sciences on Biomed. and Commun. Tech. Aalborg. 2008;1-5,
- Cordella F, Ciancio A. L, Sacchetti R, Davalli A, Cutti A. G, Guglielmelli E & Zollo L. “Literature review on needs of upper limb prosthesis users.” Frontiers in neuroscience. 2016;10.
CrossRef - Kelly M. F, Parker P.A and Scott R. N. “The application of neural networks to myoelectric signal analysis: a preliminary study,” IEEE Trans. Biomed. Eng. Mar. 1990;37(3):221-230.
CrossRef - Khaled D . “Wavelet entropy and neural network for text-independent speaker identification.” Engineering Applications of Artificial Intelligence. 2011;24(5):796-802.
CrossRef - Aydın S, Saraoğlu H.M, Kara S. Log energy entropy-based EEG classification with multilayer neural networks in seizure. Annals of biomedical engineering. 2009 Dec 1;37(12):2626.
CrossRef - Kumar S.P, Sriraam N, Benakop P.G, Jinaga B.C. Entropies based detection of epileptic seizures with artificial neural network classifiers. Expert Systems with Applications. 2010 Apr 30;37(4):3284-91.
CrossRef

